Abstract
We propose a fault-tolerant framework that redefines recovery criteria, enabling the robot to discover viable asymmetric equilibrium states.
Simulation and Framework
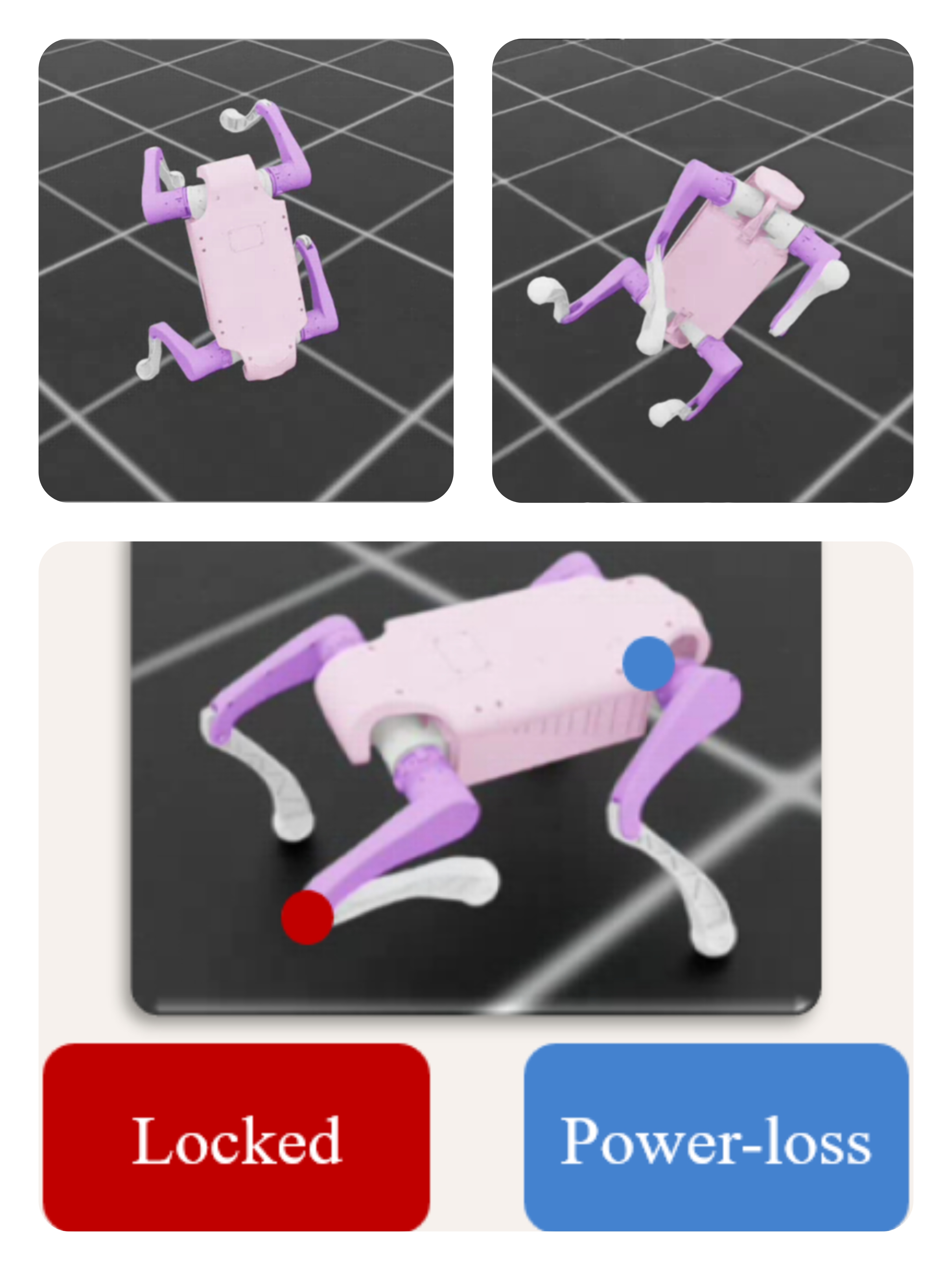
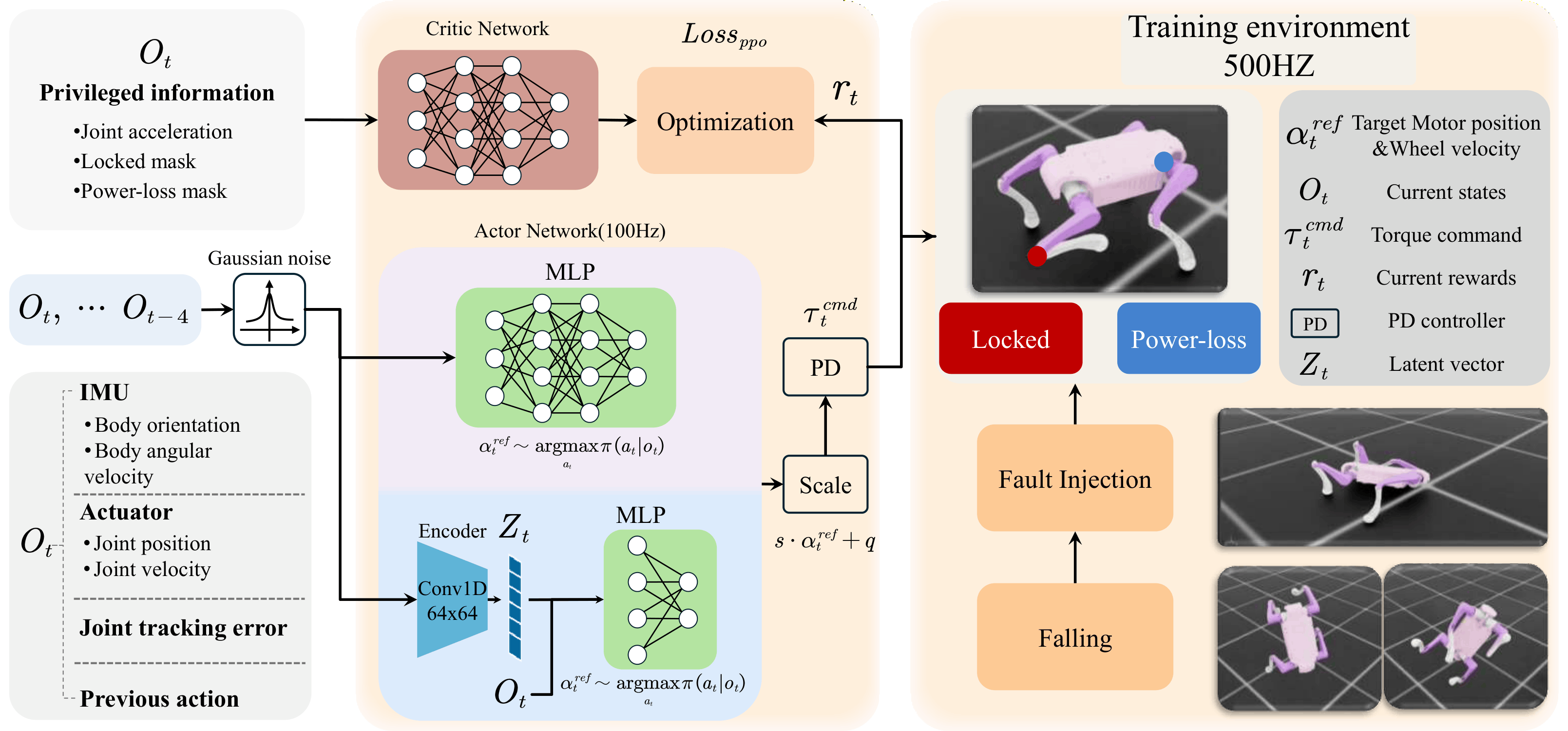
We propose a fault-tolerant framework that redefines recovery criteria, enabling the robot to discover viable asymmetric equilibrium states.