Abstract
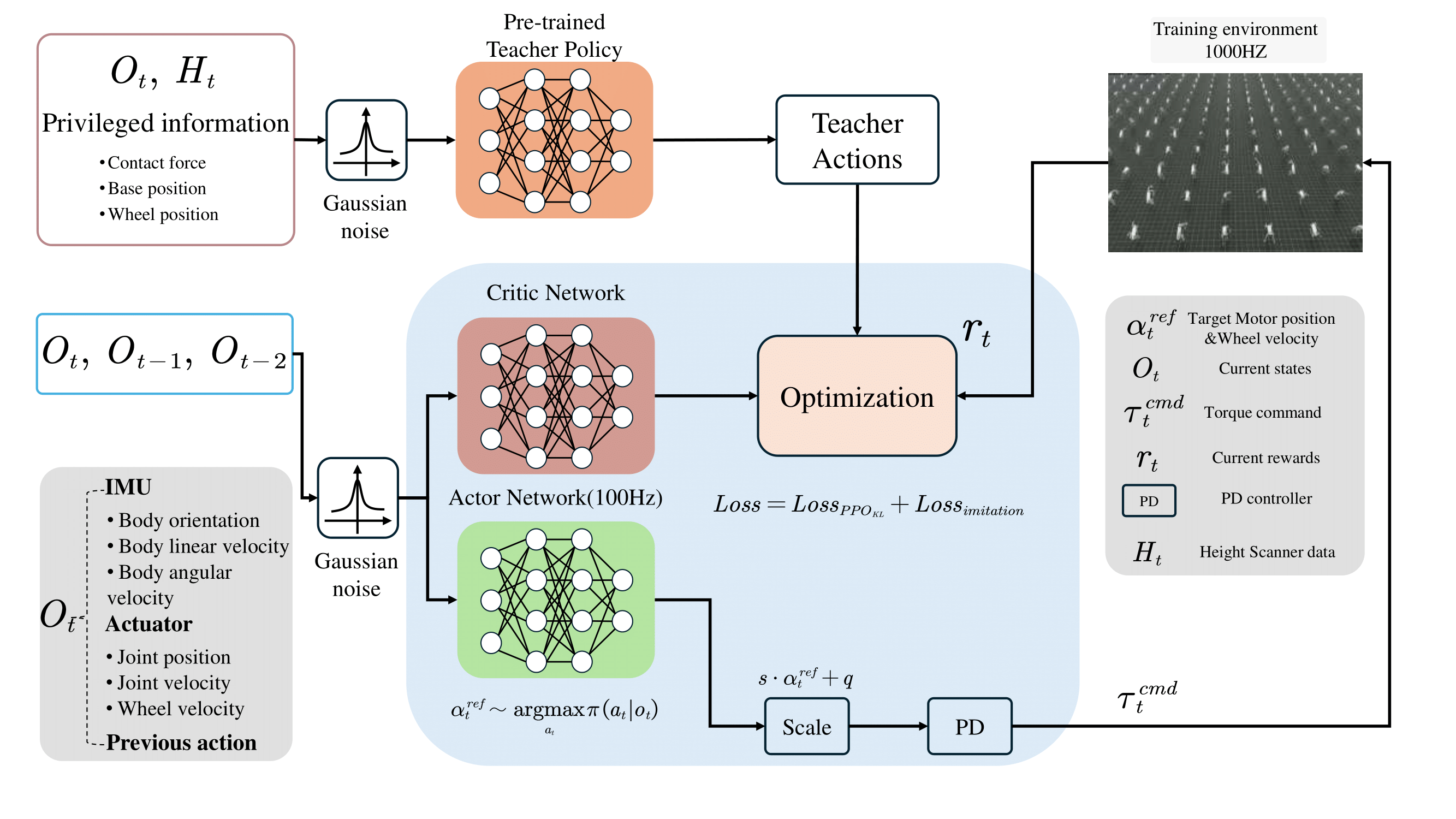
We present an optimal posture formulation and posture evaluation machanism for robotic recovery on uneven terrain and a novel teacher-student reinforcement learning framework that enables a student policy to infer external terrain conditions using only proprioceptive sensing.
Framework and Fall Simulation
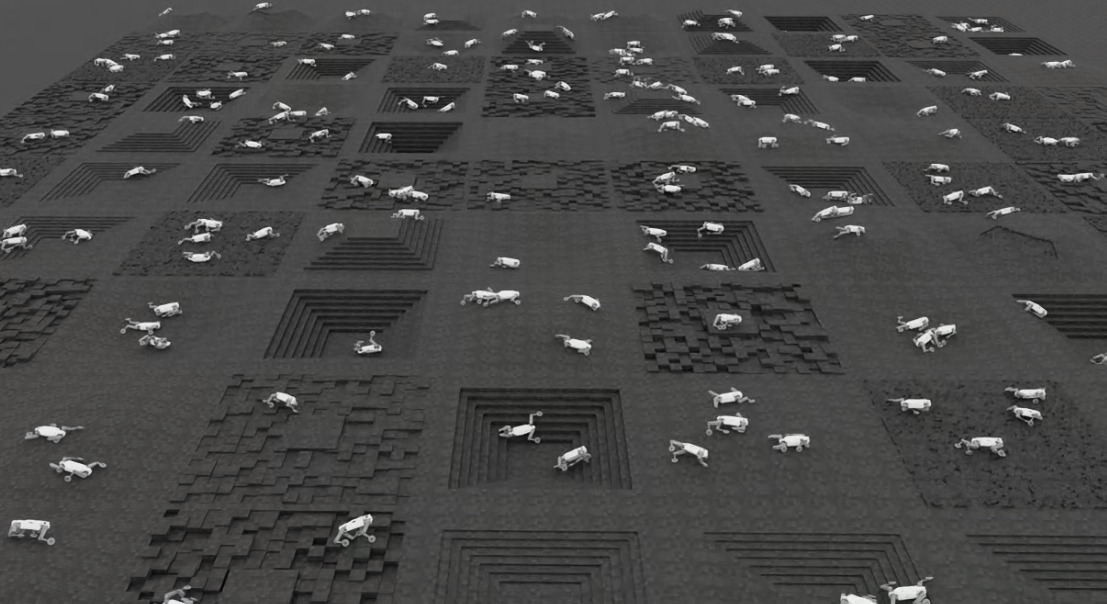
Diverse Terrains Depolyment
We show that our policy performs on the non-flat environments, also we provide the pt that anyone could be free to download it and deploy it on the real robot.
Roots environments
Stairs
Mass
Cross-Platform Validation
We show that our policy performs on the non-flat environments with Kyon robot which is Wheeled-Quadruped.
Box Grid
Pyramid Slope
Random Rough
Pyramid Stairs
Inverted Pyramid Stairs
Inverted Pyramid Stairs
Bibtex
@ARTICLE{11495090,
author={Deng, Boyuan and Yang, Xu and Mo, Yilin and Tsagarakis, Nikolaos},
journal={IEEE Robotics and Automation Letters},
title={Teacher-Guided Terrain-Aware Learning for Recovery of Quadruped Robots},
year={2026},
volume={11},
number={6},
pages={7564-7571},
keywords={Quadrupedal robots;reinforcement learning;robot learning},
doi={10.1109/LRA.2026.3688056}}
Acknowledgements:
We would like to thank all of guys from Humanoids and Human Centered Mechatronics (HHCM) for their discussions.
Template for this Website